Lorsque l’on parle des Robots dans le grand public, on n’imagine pas toujours les différents robots industriels, mais plutôt les robots humanoïdes, ou alors les bras robotique 6 axes. En effet ce sont les images les plus impressionnantes et les plus répandue dans l’imaginaire global. C’est d’ailleurs d’un robot de formation 6 axes dont nous parlions dans notre interview de Niryo.
D’un autre coté les robots industriels sont en réalité très différents entre eux. Le robot est un système qui va permettre d’effectuer des tâches auparavant manuelles et qui n’apportaient pas ou peu de valeur ajoutée. Le plus souvent il s’agit de déplacer une pièce ou un produit. On parle de mouvement.
Voyons à travers ce document les différentes architectures de robots industriels, leurs avantages et leur inconvénients.
Nous parlerons donc de robots 6 axes, de robots à architecture Delta, de robots Cartésiens, et enfin de robots Scara.



Les performances sont évidemment à mettre en perspective avec la tâche à accomplir. Les critères en question peuvent être liés à la maintenabilité, à l’évolutivité du système, à l’application, au budget, à la vitesse, à la portée, à la facilité d’intégration, à la précision, à la charge utile etc…
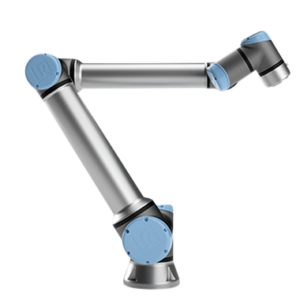
Robot 6 axes, ou bras robotique
Applications communes :
Soudage, usinage (pour le chargement/déchargement de pièces), la manipulation complexe d’objets, ou encore sur les lignes sur lesquelles il y a beaucoup de changement de format.
Avantages :
- Permet la translation et la rotation complète de l’objet à manipuler grâce aux 6 degrés de liberté.
- Peut emporter des charges lourdes
- Un seul modèle peut être utilisé sur des applications très différentes les unes des autres.
- La programmation est facile souvent à l’aide d’un terminal déporté filaire qui permet de travailler dans la zone d’évolution du robot pour sa mise au point.
Limitations :
- Le robot nécessite son propre contrôleur (ou baie robot) pour permettre de réaliser des mouvements cinématiques complexes( et l’interpolation)
- Les tailles sont fixes pour ce qui concerne la portée et la charge utile.
- La précision dépend de l’allonge
- La gestion de la sécurité peut s’avérer complexe
- La maintenance peut s’avérer complexe
Atout majeur : la flexibilité des robots 6 axes

Exemple de constructeurs de robots 6 axes : Universal Robot, Pilz, Staubli, ABB, Kuka, Yaskawa.
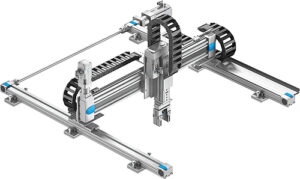
Robots industriels cartésiens
Applications communes :
Prise-dépose, usinage 2 dimensions, palettisation, packaging, systèmes de transfert.
Avantages :
- Très évolutif en fonction de la taille de votre application
- Peu supporter des charges utiles importantes ainsi que des vitesses élevées
- Pas de nécessité d’un contrôleur de mouvement spécifique. Cela signifie qu’un même contrôleur pourra piloter plusieurs robots cartésiens, ou d’autres moteurs dédiés à d’autres tâches
- Grande précision et répétabilité
- Encombrement adapté à l’espace de travail
- Maintenance très facile, solution compétitive.
- Approche simple car axes linéaires
Limitations
- Chaque application doit être étudiée pour adapter le robot
- Pas adapté dans les applications où la zone de travail doit être lavée de manière intensive.
- Nécessite un alignement et une planéité contrôlées au moment de l’installation
- Nécessite plus de programmation pour le mouvement s’il n’est pas utilisé avec un contrôleur de mouvement.
- Peu flexible, dispose typiquement de 3 translations et 1 rotation
On peut dire des systèmes cartésiens qu’ils sont optimisés pour les applications pour lesquelles ils sont conçus. On aura du mal à changer les formats de travail à moins de l’avoir prévu en amont. La zone de travail est clairement et mécaniquement délimitée la gestion de la sécurité s’en trouve “par conception” renforcée.


Exemple de constructeurs de robots cartésiens : Festo, Sepro, Wittmann
Robot Delta (cinématiques parallèles)
Application communes :
Tri de pièces, prise-dépose de petites pièces, mise en carton
Avantages :
- Très grande dynamique. En effet les masses embarquées sont faibles (les moteurs sont fixes) ce qui permet de grandes accélérations.
- Montage par dessus la zone de travail, ce qui limite l’encombrement au sol.
- L’utilisation de terminaux déportés permet une programmation aisée
- Un modèle donné peut apporter une solution à différentes applications .
Limitations
- Nécessite son propre contrôleur de mouvements dédié, en raison du besoin en ressource de calcul pour les cinématiques avancées.
- La charge utile est limitée tout comme l’enveloppe de la plage de travail.
- La flexibilité des mouvements est limitée, on trouve typiquement 3 translations avec une option pour 1 rotation
- La maintenance peut être complexe
- La construction élancée de ce type d’architecture diminue la robustesse de ce robot
- Nécessite un bâti robuste et très rigide en raison des vibrations et des contraintes engendrées par les accélérations.
L’atout majeur de ce type de robot est la rapidité pour traiter des petites pièces. Par exemple pour faire de la mise en boite de biscuits. Souvent montés avec un convoyeur et un système de vision pour repérer les emplacements des pièces ainsi que leurs orientations.



Exemple de constructeurs de robots delta : ABB, Kawasaki, Omron, Codian
Robots industriels SCARA
Applications usuelles :
Prise dépose de petites pièces
Avantages :
- Très compétitif
- L’intégration mécanique est très simple
- Programmation facile avec le terminal déporté
- Un modèle unique réponds à des tailles ou des types d’applications différentes
- Le robot peut libérer la zone de travail
Limitations
- Nécessite son propre contrôleur pour gérer les cinématiques complexes
- Charge utile limitée
- Flexibilité limitée dans les mouvements, typiquement 3 rotations et 1 translation
L’avantage principal des robots Scara est leur compétitivité. Leur dynamique est importante et leur cinématique permet d’échapper la zone de travail. Ceci présente un avantage s’ils travaillent sur des blisters ou des boites chargées par un autre robot.




Exemple de constructeurs de robots scara : Epson, ABB, Janome, Misubishi, Staubli etc…
Et les Cobots, dans tout cela ?
La notion de robots industriels collaboratifs ne dépend théoriquement pas de la technologie du robot en question. Il défini plutôt le fait que le robot est conçu pour permettre une interaction avec les êtres humains. Cela implique notamment la notion de sécurité. Les énergies en jeu doivent donc être maitrisées, les vitesses de mouvement, les masses en mouvement, le comportement en cas de défaut, d’arrêt d’urgence, ou encore la dangerosité potentielle des outils qu’ils transporte (une lame ou une seringue n’a pas la même dangerosité qu’une ventouse en silicone)
Le Cobot doit être intrinsèquement sûr. Mais cela peut limiter ses performances, notamment en terme de vitesse.